



Abstract
Existing neural field-based SLAM methods typically employ a single monolithic field as their scene representation. This prevents efficient incorporation of loop closure constraints and limits scalability. To address these shortcomings, we propose a neural mapping framework which anchors lightweight neural fields to the pose graph of a sparse visual SLAM system. Our approach shows the ability to integrate large-scale loop closures, while limiting necessary reintegration. Furthermore, we verify the scalability of our approach by demonstrating successful building-scale mapping taking multiple loop closures into account during the optimization, and show that our method outperforms existing state-of-the-art approaches on large scenes in terms of quality and runtime.Method

- Represent scene by a set of neural fields anchored to pose graph of sparse visual SLAM system
- Each field captures scene within a fixed radius surrounding it
- When pose graph updates, the neural fields' poses are updated with it
- For efficiency, each field is trained independently
- For queries, overlapping areas can be averaged to avoid transition artifacts
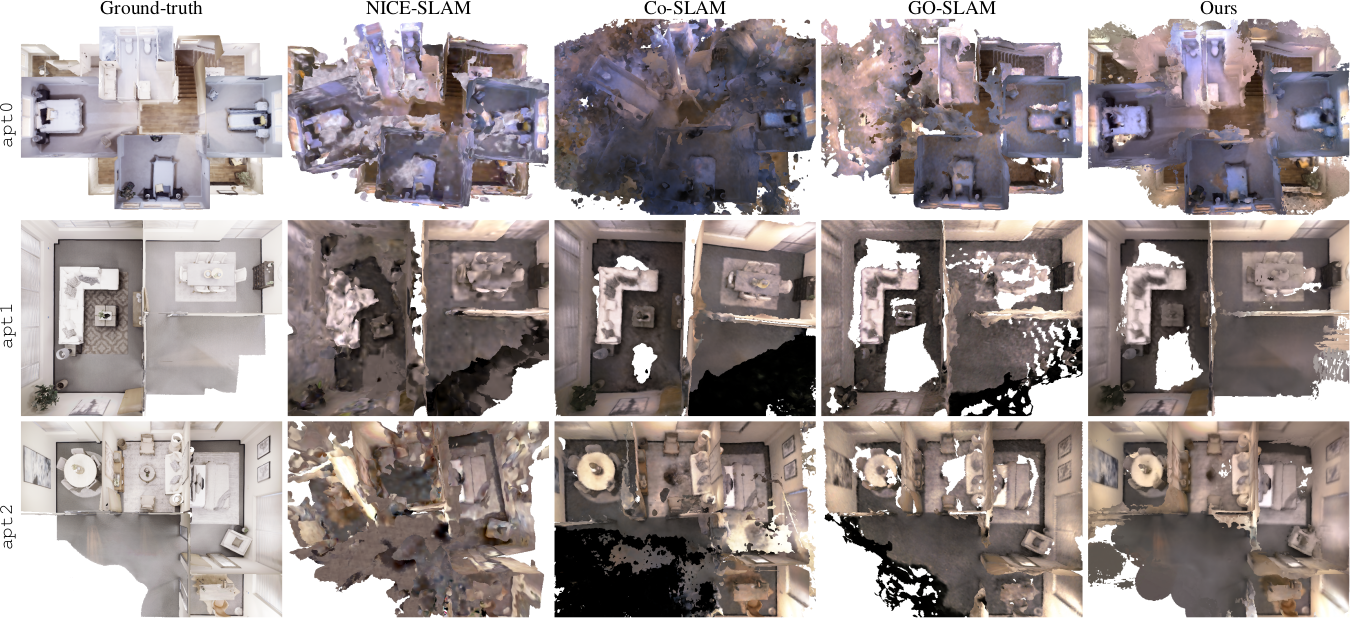
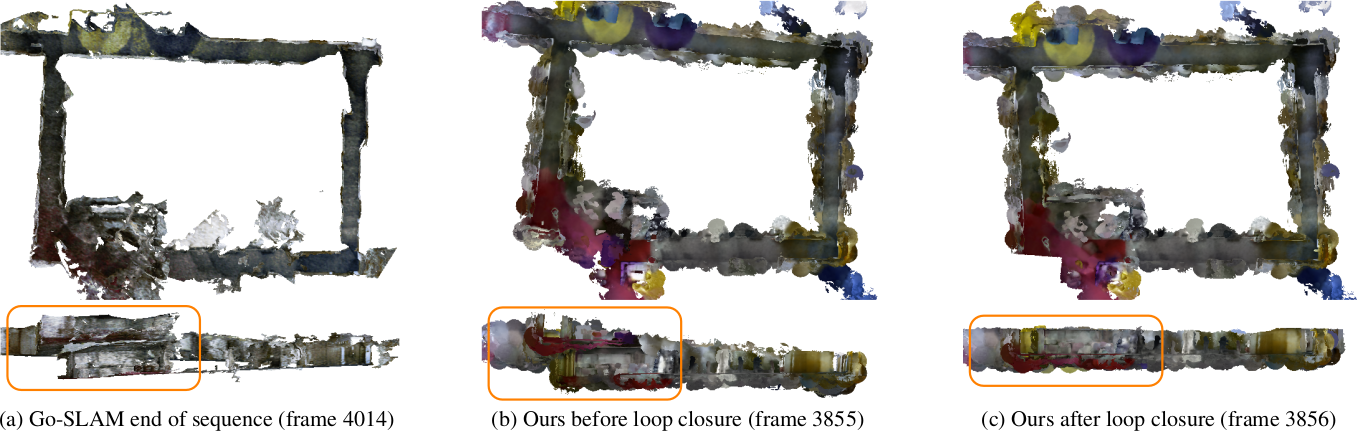
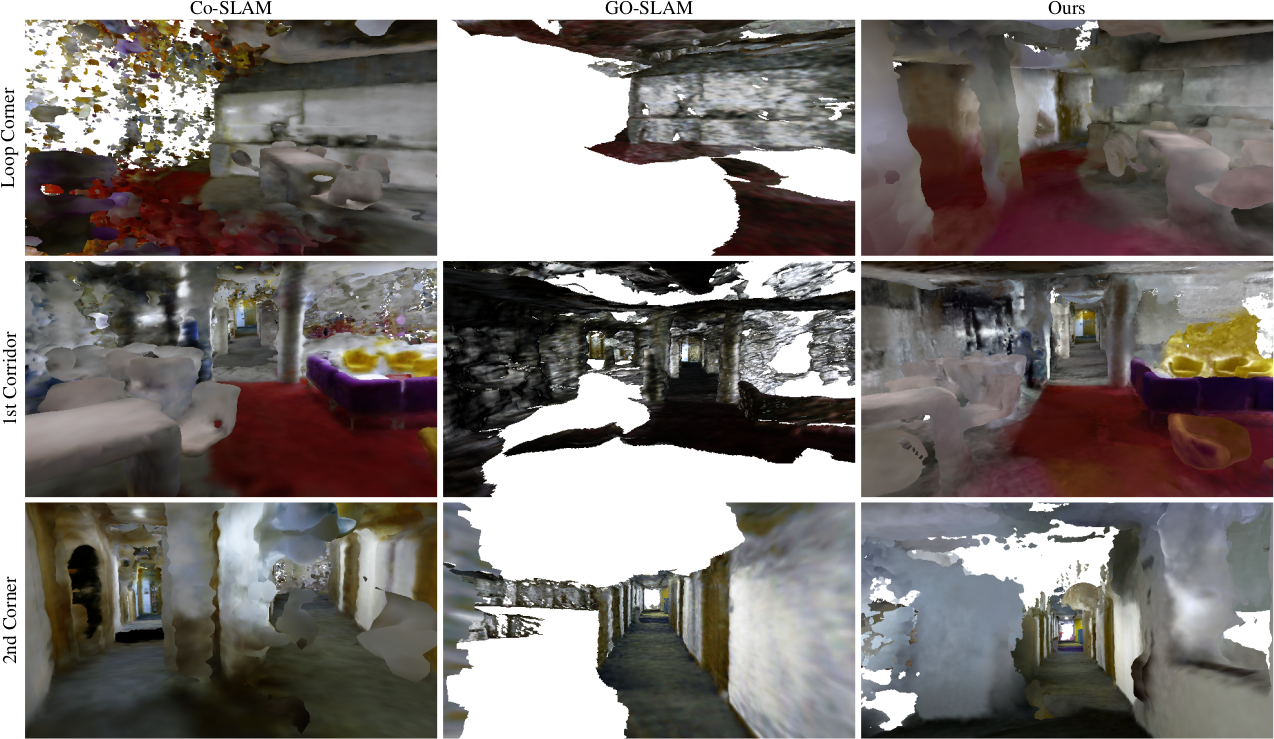
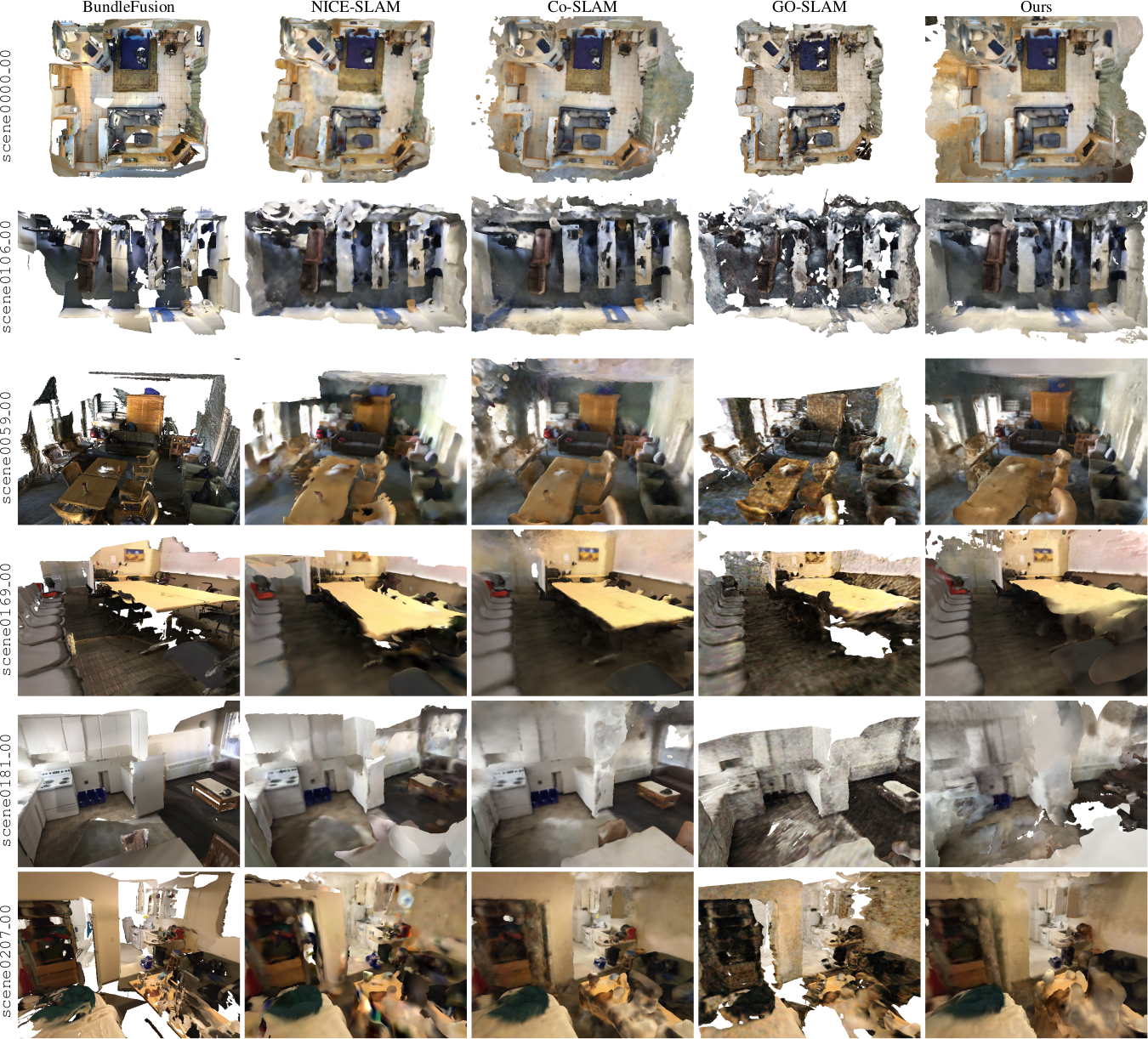
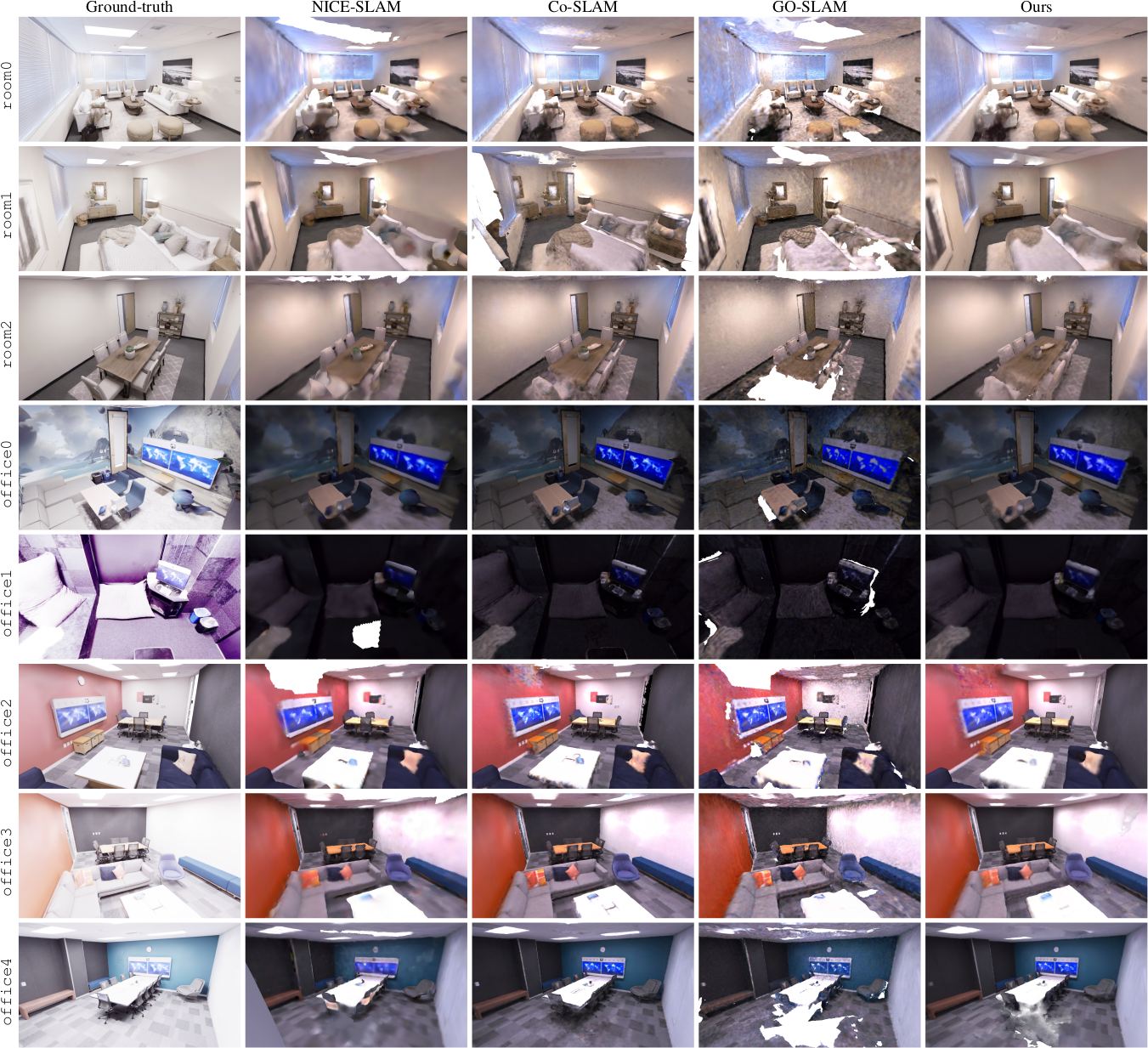
Results

Citation
@inproceedings{bruns2025neural,
title={{Neural Graph Map}: Dense Mapping with Efficient Loop Closure Integration},
author={Bruns, Leonard and Zhang, Jun and Jensfelt, Patric},
booktitle={Proceedings of IEEE/CVF Winter Conference on Applications of Computer Vision},
pages={2900--2909},
year={2025}
}